Nissan Motor Corporation presentó su primer vehículo prototipo oficial el cual demuestra completa conducción autónoma tanto en autopistas, como en calles y caminos urbanos.

Nissan mantiene dos visiones corporativas en la construcción de una sociedad de movilidad sustentable: “Cero Emisiones” y “Cero Accidentes Fatales”. En lo referente a Cero Emisiones, la meta de la compañía es eliminar la emisión de CO2 de los vehículos Nissan, mientras que Cero Accidentes Fatales busca eliminar las lesiones y muertes ocasionadas por accidentes de tránsito.
La inteligencia de los vehículos jugará un papel clave en la consecución del concepto Cero Accidentes Fatales, por lo tanto, la compañía está desarrollando una forma de inteligencia para los vehículos llamada Nissan Intelligent Driving, la cual está compuesta por varias características innovadoras que serán presentadas por etapas.
Para la primera etapa, a finales de 2016, Nissan ofrecerá Piloted Drive 1.0 en Japón, la cual permite una conducción autónoma segura en condiciones de tráfico pesado en las autopistas. Para 2018, la compañía espera implementar un sistema de conducción autónoma de múltiples carriles para cambiar de carril por sí mismo. Para 2020, una nueva tecnología será presentada la cual permitirá a los vehículos transitar autónomamente por calles y caminos urbanos, incluyendo intersecciones.
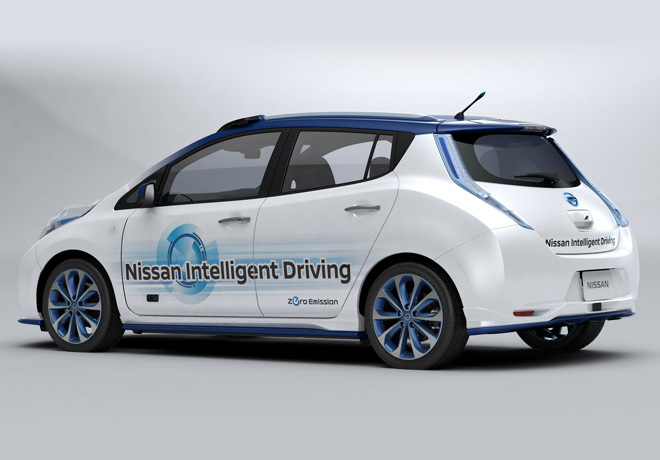
El vehículo prototipo será probado en condiciones reales de tráfico para desarrollar y mejorar la confiabilidad del sistema Nissan Intelligent Driving para uso público. El vehículo está basado en el totalmente eléctrico Nissan LEAF y se encuentra equipado con características como radar de ondas milimétricas, escáner laser, cámara, chip de computadora de alta velocidad y una especializada interfaz de máquina humana (HMI, por sus siglas en inglés), sólo por nombrar algunas.
Todo lo anterior permite que el vehículo opere de manera totalmente autónoma tanto en carreteras como en calles y caminos urbanos sin manipulación alguna del conductor, excepto por la definición del destino en el sistema de navegación. Las pruebas están planeadas para realizarse en Japón, así como en distintos países en un futuro próximo.
Dos tecnologías innovadoras fueron desarrolladas para hacer posible la conducción autónoma en calles. La primera es el más avanzado escáner laser de alto espectro en miniatura, el cual se encuentra en las últimas etapas de prototipo. El escáner laser determina con precisión la distancia entre el vehículo y los objetos que lo rodean a través del uso de una medida tridimensional la cual le permite al vehículo conducirse con seguridad por espacios angostos.
La segunda tecnología desarrollada es un sistema de cámaras en 8 direcciones que provee una vista del vehículo de 360 grados, permitiendo tomar el camino correcto al momento de conducir por intersecciones y caminos con curvas cerradas. El nuevo vehículo prototipo posee ambas innovaciones, asegurando una transportación segura y suave a la par de un excelente manejo, incluso en tráfico pesado.
“En Nissan estamos estableciendo metas claras y nos estamos preparando para implementar la conducción autónoma. Este prototipo que estamos presentando, es una prueba de cómo nos acercamos cada vez más a alcanzar esta meta”, comentó Takao Asami, Vicepresidente Senior de Nissan.
“Nissan aspira a un futuro seguro y libre de problemas automovilísticos, planeamos ser líderes en la industria en la implementación de la conducción autónoma”, finalizó Asami.
HMI (Interfaz de Máquina Humana)
Piloted Drive Commander
Posicionado en el centro de la consola, el dispositivo se encarga de diversas funciones, tales como cambiar entre conducción manual y conducción autónoma, cambio de carriles automático y más.
Área de medidores
El área de medidores adopta una pantalla LCD TFT para desplegar la información del vehículo basada en el modo de conducción y el ambiente de manejo. En el modo de conducción manual, la información relacionada con la conducción del vehículo eléctrico incluye velocímetro, la vida de la batería, la distancia recorrida, entro otras.
Para el modo de conducción autónoma, además de la información mencionada, el entorno que rodea al vehículo es mostrado en una vista de 360 grados mientras se conduce a altas velocidades, mientras que a baja velocidad, se muestra la vista frontal.
Pantalla frontal
Cuando está activado el modo de conducción autónoma, se despliega información como cambios de carril e intersecciones.
Cluster central
Para observar las condiciones de manejo durante el modo de conducción autónoma, una vista panorámica es desplegada en la pantalla grande.
Motores a Pleno
Motores a Pleno® nace en 1991 y desde entonces nos encargamos de informar todo lo referente al automovilismo y motociclismo deportivo y las novedades de la Industria Automotriz. Ha pasado por diferentes formatos como la radio o la TV por cable, y desde el año 2000 lanzamos la primera versión del sitio en internet que funciona ininterrumpidamente hasta la actualidad. Motores a Pleno® está registrado en el Instituto Nacional de la Propiedad Industrial bajo el número 2.761.752. Por lo tanto, toda persona o medio que lo utilice está usurpando una marca que no le pertenece y podría ser pasible de las acciones que correspondan.
más...
 Carlos Ghosn, Presidente y CEO de Nissan: «Hemos alcanzado una nueva era».
Carlos Ghosn, Presidente y CEO de Nissan: «Hemos alcanzado una nueva era».
 Nissan Motor y Nissan Arc desarrollan nuevo método de análisis para aumentar la capacidad de la batería litio-ion.
Nissan Motor y Nissan Arc desarrollan nuevo método de análisis para aumentar la capacidad de la batería litio-ion.
 Nuevo Nissan LEAF: otro nivel en vehículos eléctricos.
Nuevo Nissan LEAF: otro nivel en vehículos eléctricos.
 Nissan LEAF celebra su quinto aniversario alcanzando las 200 mil unidades vendidas.
Nissan LEAF celebra su quinto aniversario alcanzando las 200 mil unidades vendidas.
 Nissan producirá nuevo crossover basado en el auto concepto Nissan Kicks.
Nissan producirá nuevo crossover basado en el auto concepto Nissan Kicks.
 Nissan impulsa el desarrollo de la infraestructura de recarga para vehículos eléctricos como parte del proyecto «Fast-E» en Europa.
Nissan impulsa el desarrollo de la infraestructura de recarga para vehículos eléctricos como parte del proyecto «Fast-E» en Europa.
 Nissan anuncia el desarrollo del primer sistema de vehículos con energía eléctrica proveniente de bioetanol.
Nissan anuncia el desarrollo del primer sistema de vehículos con energía eléctrica proveniente de bioetanol.
 Nissan Serena será el primer vehículo con tecnología de conducción autónoma ProPilot en Japón.
Nissan Serena será el primer vehículo con tecnología de conducción autónoma ProPilot en Japón.
 El complejo industrial de Resende ensambla la primera carrocería del crossover global Nissan Kicks.
El complejo industrial de Resende ensambla la primera carrocería del crossover global Nissan Kicks.
 Nissan anuncia las primeras pruebas de un vehículo autónomo en calles de Europa.
Nissan anuncia las primeras pruebas de un vehículo autónomo en calles de Europa.
 Nissan realiza las primeras pruebas de vehículos autónomos en las calles de Europa.
Nissan realiza las primeras pruebas de vehículos autónomos en las calles de Europa.
 Lanzan en Japón un servicio de vehículos compartidos eléctricos ultra compactos de Nissan.
Lanzan en Japón un servicio de vehículos compartidos eléctricos ultra compactos de Nissan.
- Mercedes-AMG GT 43 ya está disponible en Argentina
- Con nuevos lanzamientos, IVECO fortalece su propuesta de productos y servicios en Argentina.
- El sector autopartista tuvo una caída en su nivel de actividad del 8,9% interanual en los primeros cuatro meses del año.
- DFSK presentó el E5 Plus, un nuevo híbrido enchufable de 7 plazas.
- FPT impulsa una nueva generación de eficiencia motorizando al Iveco Daily EURO VI.
- Scania desarrolla nuevas soluciones de transporte de personal para minería y Oil & Gas.
- Ford en Le Mans: La historia real de la primera victoria, 60 años después.
- Mercedes-Benz Camiones y Buses presenta «Campus KM a KM».
- NASCAR en el Callejero de San Diego – Carrera: Corey Heim consigue su primera victoria en la Base Naval de Coronado.
- IndyCar Series en Road America – Carrera: Christian Lundgaard ganó avanzando desde la última posición.
- Turismo Carretera en Rafaela – Final: Valentín Aguirre consiguió la victoria desde la pole a la bandera a cuadros y $15 millones de premio.
- TC Pista en Rafaela – Final: Damiani consigue su segunda victoria de la temporada y se consolida en el campeonato.
- MotoGP en Brno – Carrera: Segunda victoria consecutiva de Marc Márquez.
- TCR South America en Cuiabá, Brasil – Carreras 1 y 2: Néstor Girolami y Erick Schotten se repartieron las victorias en intensas carreras.
- Fórmula E en Sanya – Carrera: Jake Dennis se alzó con la victoria.



